 Burmese
Burmese-
 English
English -
 Français
Français -
 日本語
日本語 -
 Deutsch
Deutsch -
 tiếng Việt
tiếng Việt -
 Italiano
Italiano -
 Nederlands
Nederlands -
 ภาษาไทย
ภาษาไทย -
 Polski
Polski -
 한국어
한국어 -
 Svenska
Svenska -
 magyar
magyar -
 Malay
Malay -
 বাংলা ভাষার
বাংলা ভাষার -
 Dansk
Dansk -
 Suomi
Suomi -
 हिन्दी
हिन्दी -
 Pilipino
Pilipino -
 Türkçe
Türkçe -
 Gaeilge
Gaeilge -
 العربية
العربية -
 Indonesia
Indonesia -
 Norsk
Norsk -
 تمل
تمل -
 český
český -
 ελληνικά
ελληνικά -
 український
український -
 Javanese
Javanese -
 فارسی
فارسی -
 தமிழ்
தமிழ் -
 తెలుగు
తెలుగు -
 नेपाली
नेपाली - Burmese
-
 български
български -
 ລາວ
ລາວ -
 Latine
Latine -
 Қазақша
Қазақша -
 Euskal
Euskal -
 Azərbaycan
Azərbaycan -
 Slovenský jazyk
Slovenský jazyk -
 Македонски
Македонски -
 Lietuvos
Lietuvos -
 Eesti Keel
Eesti Keel -
 Română
Română -
 Slovenski
Slovenski -
 मराठी
मराठी -
 Srpski језик
Srpski језик -
 Español
Español -
 Português
Português








ချွေတာသောစက်ကိရိယာစက်
Jingfusi®စီးပွားရေးအရအလှည့်ကျသည့်စက်ကိရိယာများသည်အစွမ်းထက်သောဘရိတ်ဘရိတ်အရန်ယန္တရားတစ်ခုဖြင့်ဒီဇိုင်းရေးဆွဲခြင်းကိုပြုပြင်ပြောင်းလဲမှုကိုတိုးတက်စေရန်အတွက်ခိုင်မာသောဗိုင်းလိပ်တံဘရိတ်အရန်ယန္တရားတစ်ခုဖြင့်ဒီဇိုင်းပြုလုပ်ထားသည်။ တိုက်ရိုက်ကိရိယာပြောင်းလဲခြင်းစနစ်သည်လုပ်ထုံးလုပ်နည်းများကိုပြောင်းလဲစေသောကိရိယာ၏ရှုပ်ထွေးသောခြေလှမ်းများကိုသက်သာစေသည်။
မော်ဒယ်:CK76DTY
စုံစမ်းမေးမြန်းရန်ပေးပို့ပါ။
ကုန်ပစ္စည်းအကြောင်းအရာ
Jingfusi®စီးပွားရေးအရအလှည့်ကျသည့်စက်ပစ္စည်းစက်သည် 3-Axis (X, Y, z) Multi-stato Multi-stato Multi-stato Computer ကိုဂဏန်းအလှည့်နှင့်ကြိတ်ဆုံနေသည့်ဒြပ်ပေါင်းများကိုထိန်းချုပ်ထားသည်။ ၎င်းသည်လှည့်, တူးခြင်း, တူးခြင်း, ငြီးငွေ့ခြင်း, ၎င်းသည်အဆုံးနှင့်ဘေးထွက်ကြိတ်ခွဲခြင်း, တူးဖော်ခြင်း, ၎င်းသည်အထူးသဖြင့်အချို့သော rotary အစိတ်အပိုင်းများကိုရှုပ်ထွေးသောပုံစံများနှင့်မြင့်မားသောတိကျသောလိုအပ်ချက်များနှင့်အတူပြုပြင်ရန်အတွက်သင့်လျော်သည်။ ဒါဟာအားလုံး clamping အတွက် processing ခြေလှမ်းများအားလုံးသို့မဟုတ်အများဆုံးဖြည့်စွက်နိုင်ပါတယ်။ တိကျမှန်ကန်မှုကိုသေချာစေရန်, ထိရောက်မှုကိုတိုးတက်စေရန်နှင့်ကုန်ကျစရိတ်ကိုလျှော့ချပါ။
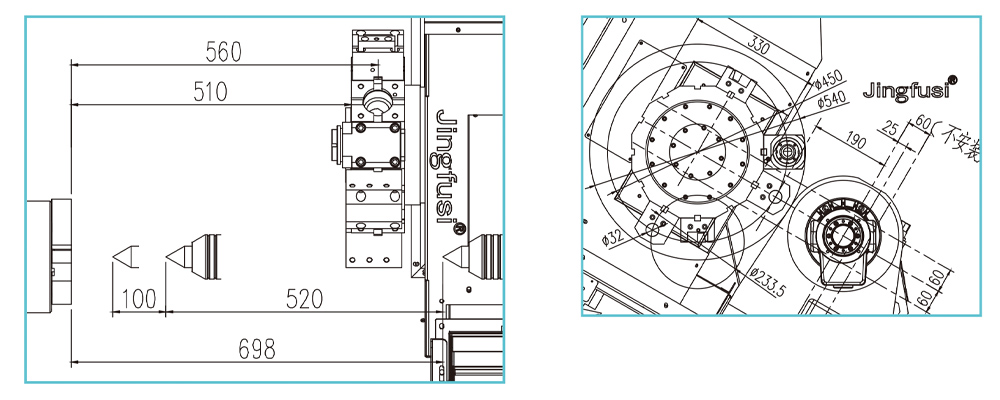
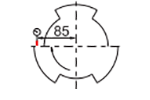
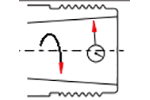
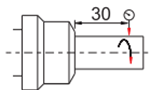
Jingfusi®စက် Travel ပုံ
ကုန်ပစ္စည်းအသေးစိတ်

parameter စာရင်း
| အချက် | ခုံ၏မော်ဒယ် | တခု | CK52dty | ck76dty | ck46dty |
| processing scope | ဗိုင်းလိပ်တံအများဆုံးအလှည့်အချင်း | မီစေမယ် | ø 700 | ||
| အများဆုံးလှည့်အပြင်စက်ဝိုင်းအရှည် | မီစေမယ် | 520 | |||
| အများဆုံးဘားအချင်း | မီစေမယ် | ø 55 | ø 72 | ø 45 | |
| ကျောင်းအုပ်ကြီးဝင်ရိုး | အများဆုံးဗိုင်းလိပ်တံမြန်နှုန်း | r / min | 4200 (3500 ချိန်ညှိခြင်း) | 3200 (2000 setting) | 6000 (4500 သတ်မှတ်ပါ) |
| ဗိုင်းလိပ်တံခေါင်း |
|
A2 - 6 | A2 -8 | A2 - 5 | |
| ဗိုင်းလိပ်တံမှတဆင့်အပေါက် | မီစေမယ် | ø 66 | ø 86 | ø 56 | |
| ကြှေးမှေး | X / z / y ဝင်ရိုးအများဆုံးလေဖြတ်ခြင်း | မီစေမယ် | 260/500 / ± 60 | ||
| 90 ဒီဂရီပါဝါခေါင်းသည်ဗိုင်းလိပ်တံ၏ဗဟိုမှတဆင့်ဖြတ်သန်းသွားသည် | မီစေမယ် | 30 | |||
| X / z / y ဝင်ရိုး၏အများဆုံးမြန်ဆန်စွာလှုပ်ရှားမှု | m / ငါ့ | 24 (setting 16) / 24 (setting 16) / 14 (setting 8) | |||
| x / z / y ဝင်ရိုးတန်းလှံတံ | မီစေမယ် | 40 | |||
| X / z / y ဝင်ရိုး Axis roller လမ်းကြောင်း | မီစေမယ် | 35/45/35 | |||
| ပါဝါဆုံလည် |
ပါဝါဆုံလည်ပုံစံ (Power Turret) | မည်သည့်ဘလဲ | bmt55 | ||
| Power Head Collet | ဖြစ် | er32 | |||
| Fixed Tool Holder အရွယ်အစား | မီစေမယ် | 25x25 | |||
| ကိုင်ဆောင်သူ Shanklank အချင်း | မီစေမယ် | ø32 | |||
| လျှပ်စစ်စက်အမျိုးမျိုး | Main Motor Power / Torque | kw / nm | 11KW / rated 72nm | 15KW / rated 98nm | 7.5 kw / rated 47nm |
| X / z / y ဝင်ရိုးမော်တာမော်တာပါဝါ / torque | kw / nm | yaskawa 2.9 kw /18.6nm လျာငှါအသစ် GAND3.1 KW / 15nM | |||
| Power / Torque ကိုဆုံလည်ပါဝါခေါင်းမော်တာ | kw / nm | မျိုးဆက်သစ် 3.1 KW / 15nM | |||
| ဆုံလည်မော်တာအများဆုံးမြန်နှုန်း | r / min | 6000 (setting 4000), ဘုံမြန်နှုန်း 4000 | |||
| Power Head Motor Power / Torque | kw / nm | 3.1 KW / 15nm | |||
| Power / Torque ၏ဆုံလည်ကိရိယာများပြောင်းလဲနေတဲ့မော်တာ | kw / nm | Genter1.0 kw /3.11nm | |||
| Tailstock | Tailstock လေဖြတ် | မီစေမယ် | 520 | ||
| Tailstock ၏အများဆုံးဟိုက်ဒရောလစ်လေဖြတ် |
မီစေမယ် | 100 | |||
| Tailstock Topestock Top Dedletle Cone Hole Taper | မေ | MOHS 5 # # | |||
| အစွန်အဖျားနှင့် Chuck အကြားအများဆုံးအကွာအဝေး | မီစေမယ် | 690 | |||
| အခြား | ဗိုင်းလိပ်တံကိုဘရိတ်စက်ကိရိယာ |
|
ဟိုက်ဒရောလစ်, optional programmable | ||
| အိပ်ရာအကေးမ | ° | 30 °သို့မဟုတ် 15 ° | |||
| Machine Tool အရှည် x width x အမြင့် | မီစေမယ် | 2500x1680x1900 | |||
| တစ်ခုလုံးကိုစက်၏စုစုပေါင်းအလေးချိန် | ကေှ့မျှန်း | 5000kg | |||
| စုစုပေါင်းပါဝါ | kw | 20 | |||
| ပျမ်းမျှပါဝါစားသုံးမှု | kw / h | 3 | |||
စက်ကိရိယာတိကျမှန်ကန်မှုကိုတိကျမှန်ကန်မှု
| စက်တိကျမှန်ကန်မှု, jingfus အချက်များစံနှုန်း: | ||||||||
| အဓိကစမ်းသပ်မှုကို | သိတတ်သောပုံ | ထောက်လှမ်းနည်းလမ်း |
စက်ရုံစံ |
|||||
| ဗိုင်းလိပ်တံ radial beat |

|
အပြင်ဘက်ကန်တော့ချွန်၏ထွက်ပေါက် detect | 0.0035 | |||||
| x-axis ထပ်ဆင့်အနေအထား |
|
x-axis ၏ထပ်ခါတလဲလဲ positecting ကို detect ။ မှတ်ချက် - အအေးအင်ဂျင်နှင့်ပူအင်ဂျင်၏အမှားအယွင်းအမှားကိုထေမိစေရန်အကြိမ် 50 ခန့်ကြိုတင်ခန့်မှန်းပါ။ ထို့နောက်ထပ်ခါတလဲလဲအနေအထားကိုရှာဖွေတွေ့ရှိပါ။ | 0.003 | |||||
| z-axis ထပ်ဆင့်အနေအထား |
 |
z ဝင်ရိုးအပေါ်ထပ်ခါတလဲလဲ positecting detect ။ မှတ်ချက် - အအေးအင်ဂျင်နှင့်ပူအင်ဂျင်၏အမှားအယွင်းအမှားကိုထေမိစေရန်အကြိမ် 50 ခန့်ကြိုတင်ခန့်မှန်းပါ။ ထို့နောက်ထပ်ခါတလဲလဲအနေအထားကိုရှာဖွေတွေ့ရှိပါ။ | 0.003 | |||||
| y-axis ထပ်အနေအထား |
|
အဆိုပါ y ဝင်ရိုးအပေါ်ထပ်ခါတလဲလဲ positecting ကို detect ။ မှတ်ချက် - အအေးအင်ဂျင်နှင့်ပူအင်ဂျင်၏အမှားအယွင်းအမှားကိုထေမိစေရန်အကြိမ် 50 ခန့်ကြိုတင်ခန့်မှန်းပါ။ ထို့နောက်ထပ်ခါတလဲလဲအနေအထားကိုရှာဖွေတွေ့ရှိပါ။ | 0.004 | |||||
| C 0 င်ရိုးထပ်ဆင့်အနေအထား |
|
C-Axis Fixed Point ၏ repositioning မှတ်စုများကိုမှတ်သားထားပါကအအေးအင်ဂျင်နှင့်ပူအင်ဂျင်၏အမှားအယွင်းကိုအပြီးသတ်ရန်အကြိမ် 50 ခန့်ကြိုတင်ခန့်မှန်းပါ, | 20 arc စက္ကန့် | |||||
| C ဝင်ရိုးအနေအထား rotary |

|
မှတ်စု - C-Axis ၏ကျပန်းအနေအထားကိုမှတ်စုများကိုစစ်ဆေးပါ။ အအေးအင်ဂျင်နှင့်ပူအင်ဂျင်၏အမှားအယွင်းကိုအပြီးသတ်ရန်အကြိမ် 50 ခန့်ကြိုတင်ခန့်မှန်းပါ, ထို့နောက်ထပ်ခါတလဲလဲချိန်ညှိချက်များကိုစစ်ဆေးပါ | 72 arc စက္ကန့် | |||||
| Power Head Clamping Beating |
|
ကန်တော့ချွန် | 0.015 | |||||
| Power Head Clamping Beating |
 |
clamping ရိုက်နှက်ခြင်း | 0.01 | |||||
| အကယ်. ဖောက်သည်သည် ISO သို့မဟုတ် VD1 ၏တိကျမှန်ကန်မှုကို X / z / y ဝင်ရိုး၏တိကျမှုကိုစစ်ဆေးလိုပါကစာချုပ်ကိုရေးသားသည့်အချိန်တွင်ဆုံးဖြတ်ရမည်။ 0 ယ်ယူသူသည်ဤပစ္စည်းကို Jingfusi စက်ရုံကိုလက်ခံခြင်း၏တစ်ချိန်တည်းတွင်စမ်းသပ်ရမည်။ | ||||||||
Hot Tags: စီးပွားရေးအလှည့်ကျသည့်စက်ကိရိယာများ, တရုတ်, ထုတ်လုပ်သူများ, ထုတ်လုပ်သူများ, စက်ရုံ, စက်ရုံ, အရည်အသွေး, စျေးနှုန်းစာရင်း
စုံစမ်းမေးမြန်းရန်ပေးပို့ပါ။
ကျေးဇူးပြု၍ အောက်ပါပုံစံဖြင့် သင်၏စုံစမ်းမေးမြန်းမှုကို အခမဲ့ပေးပါ။ 24 နာရီအတွင်း သင့်အား အကြောင်းပြန်ပါမည်။









X
သင့်အား ပိုမိုကောင်းမွန်သောကြည့်ရှုမှုအတွေ့အကြုံကို ပေးဆောင်ရန်၊ ဆိုက်အသွားအလာကို ပိုင်းခြားစိတ်ဖြာပြီး အကြောင်းအရာကို ပုဂ္ဂိုလ်ရေးသီးသန့်ပြုလုပ်ရန် ကျွန်ုပ်တို့သည် ကွတ်ကီးများကို အသုံးပြုပါသည်။ ဤဆိုက်ကိုအသုံးပြုခြင်းဖြင့် ကျွန်ုပ်တို့၏ cookies အသုံးပြုမှုကို သင်သဘောတူပါသည်။
ကိုယ်ရေးအချက်အလက်မူဝါဒ